

JGA25-360 12V 1.25W Two Wheel Self Balancing Metal Frame Chassis Smart Robot Car DIY Kit
Tax included.
Parameter:
- Dimensions: 217x72x72mm
- Weight: 508g
- Output pulse: 360cpr / circle
- Voltage range: 6-24V
- Rated voltage: 12V
- No-load speed: 201rpm / m
- No-load current: 50mA
- Load torque: 0.53kg * cm
- Rated power: 1.25W
- Load current: 300mA
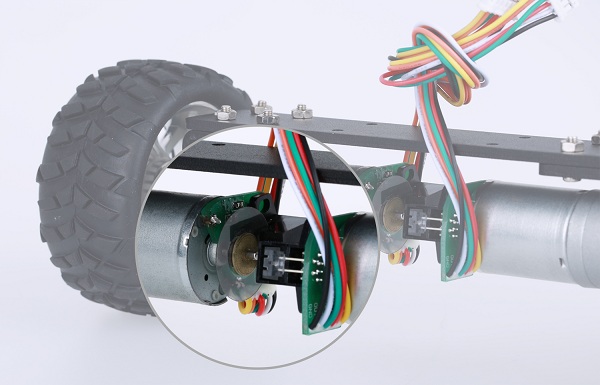
Wire connection:
- Two yellow wires on the left represent two poles of the motor
- The green and white lines are pulse output lines. You can connect one of them and connect them to measure the motor's steering.
- The red and black is for encoder wiring, red for positive, black for negative, voltage is 3.3V~5V
Note:
- Do NOT connect the red and black wire wrongly, or it will burn the encoder.
- The wire on the other side of the motor has been changed to the Dupont head 2.54 pitch, and a universal pin can be used.
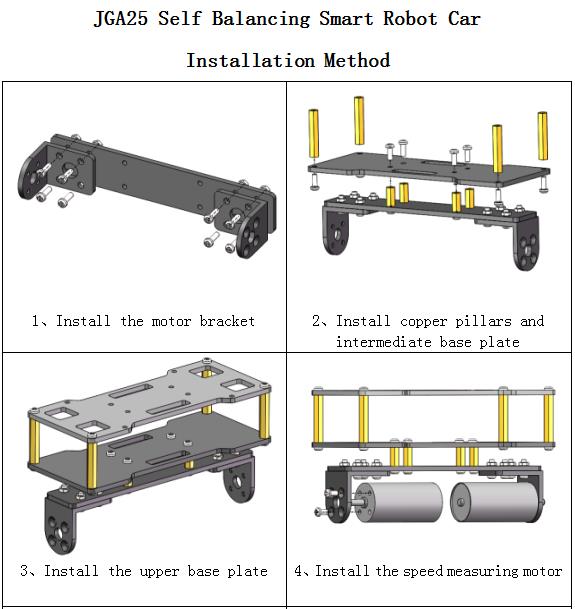
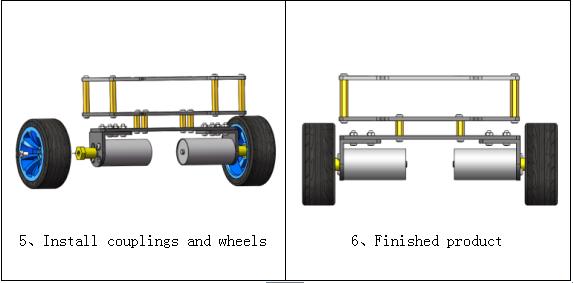
Package included:
1 x Car Chassis
2 x JGA25-360 Motor
2 x 25MM Motor Bracket
2 x 17-4MM Couplings
2 x 72MM Wheel
2 x 3MM Acrylic Chassis
4 x 12MM Copper Pillar
4 x 30MM Copper Pillar ,
, ,
, ,
, ,
,
- Dimensions: 217x72x72mm
- Weight: 508g
- Output pulse: 360cpr / circle
- Voltage range: 6-24V
- Rated voltage: 12V
- No-load speed: 201rpm / m
- No-load current: 50mA
- Load torque: 0.53kg * cm
- Rated power: 1.25W
- Load current: 300mA
Wire connection:
- Two yellow wires on the left represent two poles of the motor
- The green and white lines are pulse output lines. You can connect one of them and connect them to measure the motor's steering.
- The red and black is for encoder wiring, red for positive, black for negative, voltage is 3.3V~5V
Note:
- Do NOT connect the red and black wire wrongly, or it will burn the encoder.
- The wire on the other side of the motor has been changed to the Dupont head 2.54 pitch, and a universal pin can be used.
Package included:
1 x Car Chassis
2 x JGA25-360 Motor
2 x 25MM Motor Bracket
2 x 17-4MM Couplings
2 x 72MM Wheel
2 x 3MM Acrylic Chassis
4 x 12MM Copper Pillar
4 x 30MM Copper Pillar
,,,,