

JKM JK0220 Two Phase Hybrid Stepper Motor Driver DC12V-36V 0.3A-2.0A For CNC Robots
Tax included.
Description:
JKM JK0220 Two Phase Hybrid Stepper Motor Driver DC12V-36V 0.3A-2.0A For CNC Robots
Specification:
Feature:
Average current control, two phase sinusoidal current output.
Photoelectric isolation signal input and output.
With overvoltage , undervoltage , over-current , interphase short circuit protection function.
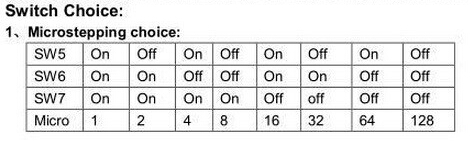
Eight channels subdivison and automatic idle-current reduction.
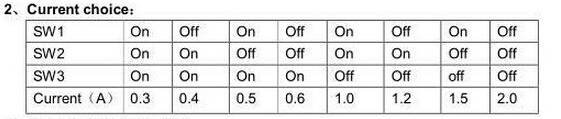
Eight channels output phase current setting.
Usage:
Widely used in different kinds of CNC machine, robots and money-counting manchines.
Package Included:
1 x Stepper Motor Driver
More Details:



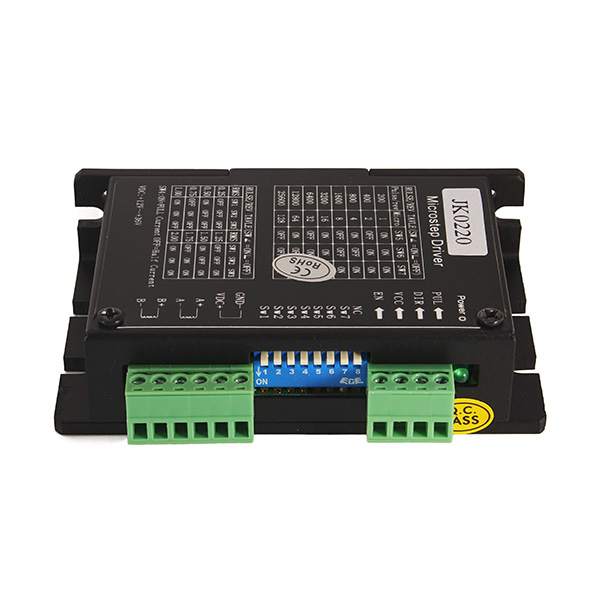



JKM JK0220 Two Phase Hybrid Stepper Motor Driver DC12V-36V 0.3A-2.0A For CNC Robots
Specification:
| Type | JK0220 |
| DC Input Voltage | 12V-36V |
| AC Input Voltage | 12-24V |
| Output Current | 0.3A - 2.0A |
| Operating Temperature | -10° - 45° |
| Storage Temperature | -20° - 125° |
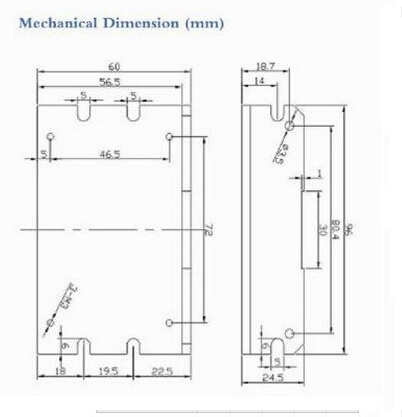
| Weight | 180g |
| Humidity | No condensation, no water droplets |
| Gas | Prohibition of combustible gasses and conductive dust |
Feature:
Average current control, two phase sinusoidal current output.
Photoelectric isolation signal input and output.
With overvoltage , undervoltage , over-current , interphase short circuit protection function.
Eight channels subdivison and automatic idle-current reduction.
Eight channels output phase current setting.
Can drive 2 phase and 4 phase hybrid stepper motor when phase current less than 2.0A.
20KHz PMW
Usage:
Widely used in different kinds of CNC machine, robots and money-counting manchines.
Note:
When ambient temperature is high or working current over 1.05A, fix the module on big metal shell, or use axle flows fan dispels the heat, to manke the module run reliably for a long time.
Half current automatically: if control machine not send out signal in half second, driver enter half current state of automatically for electricity saving, the phase current of the winding of the eletric.
Package Included:
1 x Stepper Motor Driver
More Details: