

DIY T400 Aluminum Alloy Metal Wall-E Tank Chassis Robot Crawler Track
Tax included.
There are three kinds you can choose:
A: Chassis + Wheel
B: Chassis + Wheel + Espduino kit
C: Chassis + Wheel + NodeMcu Lua kit
Introduction:
This Aluminum alloy Wall-E tank chassis is designed with novelty, beautiful shape,and has a stability and firmness. The two motors are very strong with measure velocity Hall sensors. This high quality tank chassis can be forward, back ward flexible whirl. Wall-E tank chassis can be applied to the remote controlled wireless monitoring, especially on the dangerous place.
Features:
Name: Wall-E tank chassis
Material: Aluminum alloy
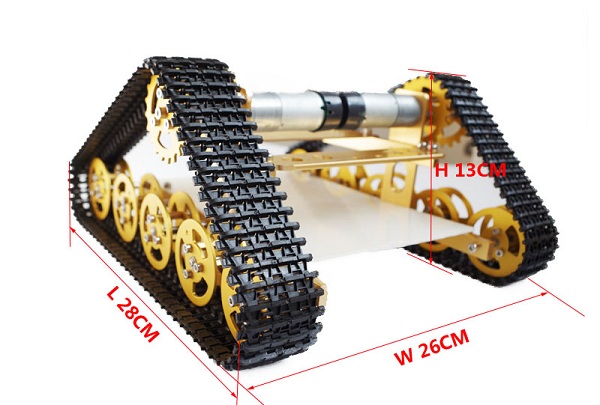
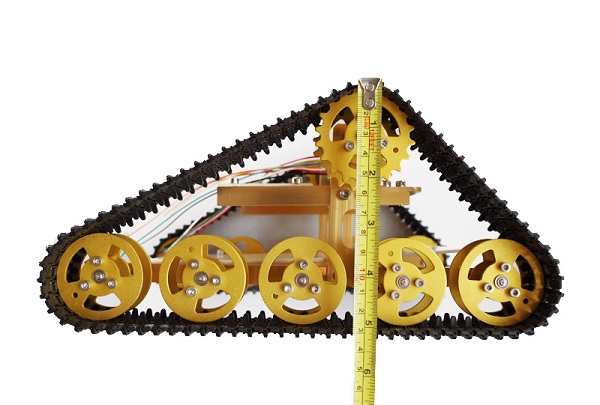
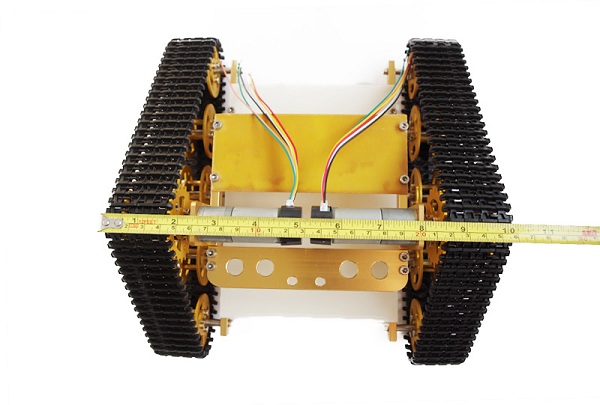
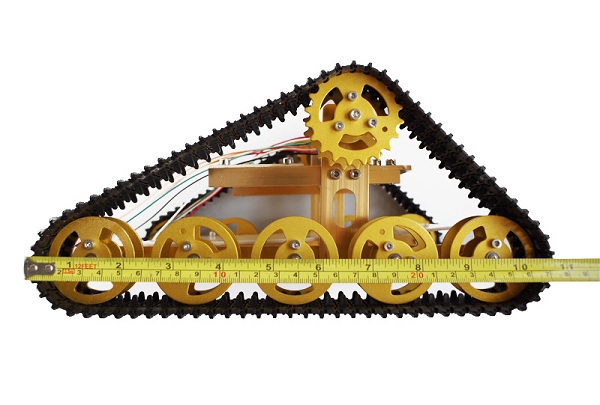
Size: 270*260*140mm (length*width*high)
Motor working voltage: 9-12V
Note:
This item just includes the tank chassis, not containing the electronics.
Package included:
1 x Aluminum alloy chassis
2 x Driving wheel
2 x Induction wheel
8 x Bearing wheel
2 x Motor(where, VM and GM are connected to motor, V and G are the powering line for sensor, S1 and S2 are the output signal)
 ,
, ,
, ,
, ,
,
A: Chassis + Wheel
B: Chassis + Wheel + Espduino kit
C: Chassis + Wheel + NodeMcu Lua kit
Introduction:
This Aluminum alloy Wall-E tank chassis is designed with novelty, beautiful shape,and has a stability and firmness. The two motors are very strong with measure velocity Hall sensors. This high quality tank chassis can be forward, back ward flexible whirl. Wall-E tank chassis can be applied to the remote controlled wireless monitoring, especially on the dangerous place.
Features:
Name: Wall-E tank chassis
Material: Aluminum alloy
Size: 270*260*140mm (length*width*high)
Motor working voltage: 9-12V
Note:
This item just includes the tank chassis, not containing the electronics.
Package included:
1 x Aluminum alloy chassis
2 x Driving wheel
2 x Induction wheel
8 x Bearing wheel
2 x Motor(where, VM and GM are connected to motor, V and G are the powering line for sensor, S1 and S2 are the output signal)
,,,,